





地址:深圳市宝安区西乡街道恒丰工业城B17栋4楼
传真:0755-27671000
邮箱:Service@simanbo.com

智能交通监控工程施工项目
1 项目概述
1.1 项目范围
随着社会经济发展,交通在人类经济、社会活动中的地位日益显著。交通管理的层次和质量更是与人们生活密切相关,直接影响城市的投资环境和城市形象。目前xx县汽车保有量逐年激增,交通拥堵、事故频发、环境污染、运输效率低下等问题不断加剧,因此针对xx县交警本次进行建设智能交通监控工程施工项目,主要包括电子警察系统、监控中心智能交通管控平台及云存储系统等。
加快建成“道路畅通、社会和谐、环境优美”的智慧交通城市。同时考虑xx县的治安监控和交通管理监控资源的充分利用,为避免重复建设,实现资源共享和整合,本次建设xx县交警的十个路口监控抓拍改造设备需与xx县交警大队集成指挥平台实现无缝对接,并能够与xx市公安局交警支队集成指挥平台实现无缝对接,实现车辆数据及视频等数据的互通。
2 项目改造概述
此次的xx县改造的十个路口改造交通监控工程施工主要包含以下路口详细信息:
1、xx路口:
现场工勘情况如下:
三个方向,双向四车道,道路两边设计有花带。平时过往车辆较多,交通比较拥堵,容易发生不按导向行驶而造成交通事故,附近有多个住宅小区,人流密集。
建议新建三套电子警察抓拍系统,针对机动车的不按导向线行驶、逆行等违章行为进行抓拍。
2、xx大道:
现场工勘情况如下:
三个方向,双向四车道,路口位于xx县汽车站,车辆经过车站附近没有红绿灯,经常发生不按导向行驶而造成交通事故,车流量较大,人流密集。
建议新建四套电子警察抓拍系统,针对机动车的不按导向线行驶、逆行等违章行为进行抓拍。
3、xx桥头北端:
现场工勘情况如下:
二个方向,平时过往车辆较多,附近有大型商场与居民楼人流密集。
根据需求建议新建二套逆行抓拍系统,针对机动车的逆行等违法行为进行抓拍。
4、广场xx门口
现场工勘情况如下:
一个方向,平时过往车辆较多,经常有逆行车辆造成交通事故,附近有大型活动广场、很多购物商店、居民楼人流密集。
根据需求建议新建一套逆行抓拍系统,针对机动车的逆行等违法行为进行抓拍。
5、xx大道与xx路十字路口:
现场工勘情况如下:
四个方向13车道,新区主干道周边是公园、办公楼、居民小区等,车流、人流密集。
新建四套反向卡口抓拍系统,对机动车压黄线、压实线、不系安全带、接打电话等行为进行违法抓拍。
6、xx大道与xx三叉路口:
现场工勘情况如下:
三个方向10车道,新区主干道周边有学校、公园、居民楼车流、人流密集。
根据需求建议新建三套反向卡口抓拍系统,对机动车压黄线、压实线、不系安全带、接打电话等行为进行违法抓拍。
7、xx大道与xx路十字路口:
现场工勘情况如下:
四个方向电警全部被道路施损坏,管道与线路都不通,东方向四车道没有摄像与补光灯,路口位于学校边上交通车流量、人流量密集区。
根据需求建议恢复电子警察抓拍系统功能,针对机动车的闯红灯、实线变道、不按导向线行驶、逆行等违章行为进行抓拍。
8、xx路与xx路十字路口:
现场工勘情况如下:
四个方向10车道,路口有大型商场、办公楼、居民小区等,车流、人流量密集区。
建议新建四套电子警察抓拍系统,针对机动车的闯红灯、实线变道、不按导向线行驶、逆行等违章行为进行抓拍。新建四套反向卡口抓拍系统,对机动车压黄线、压实线、不系安全带、接打电话等行为进行违法抓拍。
9、xx大道与xx路十字路口:
现场工勘情况如下:
四个方向16车道,新区主干道周边是办公楼、居民小区等,车流、人流量密集区。
建议新建四套电子警察抓拍系统,针对机动车的闯红灯、实线变道、不按导向线行驶、逆行等违章行为进行抓拍。新建四套反向卡口抓拍系统,对机动车压黄线、压实线、不系安全带、接打电话等行为进行违法抓拍。
10、xx大道与xx大道十字路口:
现场工勘情况如下:
四个方向12车道,路口有商场、办公楼、居民小区等,车流、人流量密集区。
建议新建四套电子警察抓拍系统,针对机动车的闯红灯、实线变道、不按导向线行驶、逆行等违章行为进行抓拍。新建四套反向卡口抓拍系统,对机动车压黄线、压实线、不系安全带、接打电话等行为进行违法抓拍。
2.1 高清电子警察系统
2.1.1 前端点位建设需求
本次xx县十个路口新增公路安全设施新建10个路口共60台900万高清电子警察及反向卡口抓拍摄像机,高清电子警察系统采用视频检测方式,实现卡口抓拍,兼具对不按导向车道行驶、逆行等违法行为抓拍,同时实现车牌识别、实时路面监控功能。
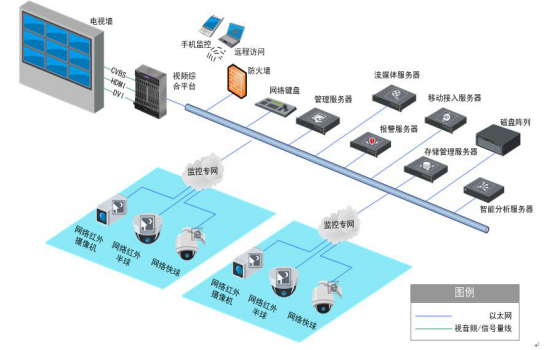
2.1.2 前端设备组成
视频采集前端主要包括:电子警察摄像单元、频闪补光灯、路口终端控制主机等。
电子警察高清摄像单元承担违法图像采集取证功能,实现抓拍逻辑的判断、图像的采集、图像的识别、数据存储、光信号分析处理、补光控制等功能。通过相机DSP内置算法实时对过往车辆进行检测,核心部分摄像机能够在最短时间内被触发,拍摄下车辆的特征图像,并进行牌照自动识别、压缩存储等操作。根据现场照度不同进行补充照明,在环境照度良好情况下利用车辆牌照夜间具有荧光效果这一特性,控制具有特殊光谱的LED灯,在夜间增强牌照图片效果。
电子警察摄像单元主要由电子警察摄像机、高清镜头、温控护罩组成。摄像机内置视频检测算法,通过视频流分析过往车辆信息触发车辆进行抓拍,抓拍的图片包含车辆号牌、车辆特征、违法过程等信息。
数据存储模块采用内置eMMC存储为数据载体,容量不低于16G可选,对网络中断或前端存储产品故障时,可将采集数据暂存前端eMMC存储,待网络或主机恢复后再进行续传。本次工程选用900万电子警察摄像单元可抓拍单向3车道,视场范围可覆盖4车道。
2.1.3 功能需求
2.1.3.1 车辆捕获功能
系统应能采用对过往车辆进行检测记录,捕获率不小于99%,记录有效率应不小于99%。
2.1.3.2 全天候监控及监控录像
系统在支持抓拍高分辨率图片的同时,应能实现24小时高清全画幅25帧视频录像功能。可以在白天或夜间有辅助光源的情况下实现清晰录像;视频编码格式支持主流的H.265、H.264;可自动记录车辆通过时间、地点、所在车道、违法类型等信息;录像中应能清晰地反映车辆的颜色、车辆类型、运动轨迹;并提供录像查询、录像下载等功能。
2.1.3.3 车牌识别功能
系统能识别的号牌结构应包括:新能源车牌;单排字符结构的号牌;武警用小型汽车号牌;警用汽车号牌;双排字符结构的号牌,如军队用大型汽车号牌、武警用大型汽车号牌、GA36-2007中的大型汽车号牌、挂车号牌、低速汽车号牌等。
系统能识别号牌字符应包括:数字:0~9;字母:A~Z;省市简称:京、津、晋、冀、蒙、辽、吉、黑、沪、苏、浙、皖、闽、赣、鲁、豫、鄂、湘、粤、桂、琼、川、贵、云、藏、陕、甘、青、宁、新、渝;军牌用汉字:军、海、空、北、沈、南、兰、广、成、济、京;号牌分类用汉字:警、学、领、试、挂、港、澳、超、使;武警号牌特殊字符:WJ、00~34、练。
日间车辆号牌识别准确率不小于95%,夜间车辆号牌识别准确率应不小于90%。
2.1.3.4 车身颜色识别
系统应可对车辆具体颜色进行分类识别,至少支持11种颜色识别: 白、黑、灰(银)、红、黄、蓝、绿、粉、紫、棕、橙。
2.1.3.5 机动车闯红灯违法行为记录功能
本系统采用非破路施工检测手段(视频检测),对闯红灯行为进行记录。闯红灯记录符合《中华人民共和国公共安全行业标准〈闯红灯自动记录系统通用技术条件〉》GA/T496-2014标准。机动车闯红灯行为记录功能捕获率应不小于95%,车牌识别准确率不小于90%。
2.1.3.6 红绿灯信号检测
系统对红绿灯信号的检测应采用双冗余模式,采用物理信号检测器和算法自动识别两种方式,即红灯信号检测器正常运行时,使用信号机提供的红灯切换信号;在红灯信号检测器出现故障时候采用视频检测方式自动检测红灯信号,整个切换过程系统自动判定和切换,无需人工操作。为方便施工组网和节省布线施工成本,红绿灯信号检测器需通过IP网络将红绿灯信号传输给摄像机使用。
2.1.3.7 违法事件检测功能
系统应可以通过对视频的智能分析判断逆向行驶、不按导向行驶等违法行为,并且对违法车辆进行抓拍,同时,对逆向行驶、不按导向行驶等违法行为进行抓拍记录,系统抓拍三张违法图片,以记录违法的整个过程。
2.1.3.8 不按车道行驶记录功能
不按车道行驶是指车辆遇到“分向行驶车道”不按规定的车道行驶,包括左转、右转车辆占用直行车道,或在左转、右转车道上直行等情形。系统应支持此类违法行为的记录,以三张图片清晰、完整表现违法过程。违法证据应符合最新的《道路交通安全违法行为图像取证技术规范》(GA/T832-2014)。
2.1.3.9 违法变道记录功能
路口平行的两个车道间为白实线或者双黄线,则车辆不能跨越车道线在这两个车道之间随意变换位置行驶。系统应能够对违法变道车辆进行记录,抓拍三张不同位置的图片以反映整个违法变道过程。违法证据应符合最新的《道路交通安全违法行为图像取证技术规范》(GA/T832-2014)。
2.1.3.10 压线行驶记录功能
系统应支持对压线行驶的违法车辆进行检测、抓拍记录与识别。违法证据应符合最新的《道路交通安全违法行为图像取证技术规范》(GA/T832-2014)。
2.1.3.11 逆向行驶记录功能
逆行即车辆的行驶方向与车道规定的方向相反。系统应支持对逆向行驶的违法车辆进行检测、抓拍记录与识别。违法证据应符合最新的《道路交通安全违法行为图像取证技术规范》(GA/T832-2014)。
2.1.3.12 智能补光功能
通过相机智能测光控制,系统应自动根据外界环境调试补光的方式及亮度,当外界处于强光或逆光情况时,应采用补光灯进行补光,确保能清晰的记录到人脸等车辆内部特征;当外界处于晚上,阴雨天时,应采用全景的补光灯进行补光,对相机覆盖范围的路况信息、车辆信息、车内信息等特征进行记录补光,同时系统根据环境光情况对亮度进行调整,保证在7*24小时环境下都能拍摄到清晰图片。为了防止眩光,采取高频脉冲方式和消光技术措施减少对周边环境的影响,不影响驾驶员安全驾驶。
2.1.3.13 断点续传功能
系统应能支持前端缓存和断点续传。前端摄像机配备内嵌式eMMC存储硬件,负责存储本摄像机的抓拍图片。支持不低于16G eMMC存储空间,单台相机存储容量大于8万张数据,当eMMC存储达到最大储存容量时,自动进行循环覆盖。若网络中断或其它故障,数据无法上传至管理中心时,可暂时将数据存储在前端存储中,待网络恢复后前端存储设备自动上传网络中断期间的数据至管理中心,防止数据丢失。
2.1.3.14 简易组网功能
系统应支持抓拍相机通过光纤直连路口控制主机,实现简单组网,方便后期维护。
2.1.3.15 图像防篡改功能
系统应支持前端抓拍设备采集的图片在摄像机里进行防篡改处理,通过加入原始防伪信息,防止原始图片在传输、存贮和校对过程中被人为篡改,保证数据来源的有效性。
2.1.3.16 远程维护功能
系统应具备故障自动检测功能,能通过软硬件自动检测系统故障并恢复正常工作。具有断电自动重启动、自动侦错报错、自动监测摄像机单元运行状态功能。
2.1.3.17 防雷功能
系统中的所有设备应具备防雷设计,设备通讯接口符合防雷设计标准。应充分考虑各项环境参数和配套保护措施,包括电源空开、网络防雷、电源防雷、电流电压保护器。
2.2 产品优势
2.2.1 图像成像一致性:偏振镜自动升降保障图像质量一致性
相机系统安装在户外,成像质量受天气、光线变化及夜间车大灯影响较大,要保证系统全天候、24小时的正常运行,必须解决各种光线条件下成像问题。如何保障全天候图像成像一致性?
实现方式:高清卡口系统在拍摄时应该满足全天候车辆、车牌和人内人脸信息的清晰,然而在逆光或者强光的时,前挡风玻璃会反射光线,在车窗玻璃折射出偏振光,给驾驶人面部抓拍制造障碍,系统摄像单元应采用专业光学处理方法,可自动根据测光控制来驱动偏振镜的升降,在白天强光或逆光情况时,偏振镜自动下降,光学处理和图像处理通过偏振镜将偏振光过滤掉,在晚上时或者光线不足情况下,偏振镜自动升起,不影响图像整体的成像效果。
友商状态: 偏振镜是始终固定在镜头前端的, 不管白天晚上都起到滤光的作用,夜间影响正常光线进入,所以应用偏振镜均在使用前会调试,宇视是在公司出厂前已调试好,而友商是让现场施工人员调试转动。
2.2.2 系统长期稳定可靠运行:一体化交付
实现方式:为确保系统稳定性,需要充分考虑各项环境参数和配套保护措施,要求包括电源空开、网络防雷、电源防雷、电流电压保护器、摄像机,测光控制板、风扇及加热等。系统在出厂前完成组装、效果验证及高低温环境实现,对现场施工便捷性带来很大方便,同时系统稳定性和兼容性最高。
友商状态:早期是散件发到现场由施工人员组装,现初步在出厂时会增加风扇、电源和网络防雷,也按一体化方式交付。
2.2.3 根据不同场景选择不同补光方式:夜间采用红外补光
针对道路情况不同,可提供哪些补光方式,当卡口点位部署在群人密集的广场、党政机关或居民区附近时,现有的项目按包围圈的方式进行建设,在建设模式上就存在安装点位在居民区或机关旁边,如何避免夜间模式对周边行人和驾驶员?
实现方式:为适用各种道路环境,要求厂家可提供闪光灯补光和红外补光的方案,针对部署在人员密集的广场、党政机场或居民区周边的卡口点位可选择性的使用红外补光,避免夜间造成对行人和驾驶员的视线影响。同时在红外补光方案时能达到95%的识别率。
友商状态:暂不支持红外补光。
2.2.4 传输方式灵活多样:提供多种组网接口
针对不同路口的传输线路不尽相同,目前主流的几种组网方式都各有利弊,厂家前端系统可提供哪些组网方式?
实现方式:目前主流组网方式电口、SFP光口和EPON,可根据不同的需求进行灵活的选型,要求前端相机可提供如上三种组网方式。方便用户选择组网方案。在城市治安动态监控系统采用EPON无源光网络,大幅减少光纤数量,降低系统综合成本和线路租金。
友商状态:友商目前只支持通过电口方式组网。
2.2.5 全对象进行记录:线圈模式下逆行判定功能
道路形式中逆行车辆比比皆是,首先对道路安全存在隐患,其次对公安客户而言,逆行车辆属犯罪逃逸的概率要远大于正常行驶车辆,对交警而言,逆行本身就属于违章行为,如何在主流的检测检测模式下保障对逆行车辆的准确记录。
实现方式:在主流的三种检测模式下,雷达模式依靠多普勒原理具备逆行判定功能,视频检测模式可通过跟踪车牌来判定逆行车辆,但对于传统的线圈检测模式,就存在逆行大型轿车拍不全车辆信息的情况,要求系统在线圈模式下具备逆行判定功能,保障能准确的抓拍到车辆行驶的尾部信息。从理论分析线圈模式具备逆行判定功能,则需经过车辆某一时刻同时压在两线圈,则要求线圈中心距为三米。
友商状态:友商目前线圈模式不能保障逆行全面记录尾部信息特征,同时友商的线圈中心距为4米。
2.2.6 视频流稳定传输: ISCSI直存
前端规模增大时,后端服务器对视频流的转发会成为瓶颈,同时如何实现基于公安实战应用图片+视频模式下视频流精确到秒?


